Continuous Adaptation via Meta-Learning in Nonstationary and Competitive Environments: Difference between revisions
No edit summary |
No edit summary |
||
| Line 23: | Line 23: | ||
good generalization performance on that task" (Finn et al, 2017) | good generalization performance on that task" (Finn et al, 2017) | ||
[[ | [[media:MAML.png]] | ||
= Probabilistic Framework for Meta-Learning = | = Probabilistic Framework for Meta-Learning = | ||
Revision as of 20:36, 12 March 2018
Introduction
Typically, the basic goal of machine learning is to train a model to perform a task. In Meta-learning, the goal is to train a model to perform the task of training a model to perform a task. Hence in this case the term "Meta-Learning" has the exact meaning you would expect; the word "Meta" has the precise function of introducing a layer of abstraction.
The meta-learning task can be made more concrete by a simple example. Consider the CIFAR-100 classification task that we used for our data competition. We can alter this task from being a 100-class classification problem to a collection of 100 binary classification problems. The goal of Meta-Learning here is to design and train and single binary classifier that will perform well on a randomly sampled task given a limited amount of training data for that specific task. In other words, we would like to train a model of perform the following procedure.
- A task is sampled. The task is "Is X a dog?"
- A small set of labeled training data is provided to the model. The labels represent whether or not the image is a picture of a dog.
- The model uses the training data to adjust itself to the specific task of checking whether or not an image is a picture of a dog.
This example also highlights the intuition that the skill of sight is distinct and separable from the skill of knowing what a dog looks like.
In this paper, a probabilistic framework for meta learning is derived then applied to tasks involving simulated robotic spiders. This framework generalizes the typical machine learning set up using Markov Decision Processes.
Model Agnostic Meta-Learning
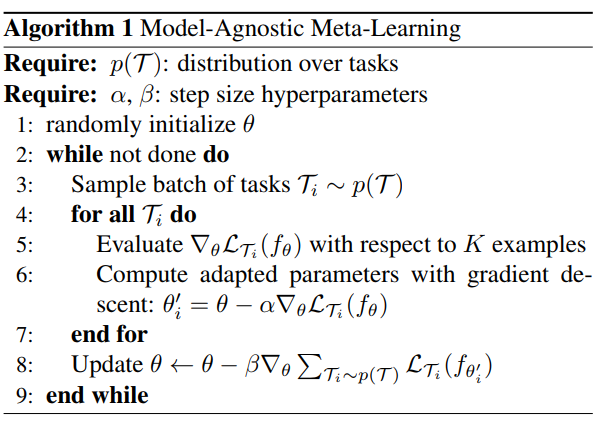
An initial framework for meta-learning is given in "Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks" (Finn et al, 2017)
"In our approach, the parameters of the model are explicitly trained such that a small number of gradient steps with a small amount of training data from a new task will produce good generalization performance on that task" (Finn et al, 2017)
{kind=link}
Probabilistic Framework for Meta-Learning
Training Spiders to Run with Dynamic Handicaps (Robotic Locomotion in Non-Stationary Environments)
Training Spiders to Fight Each other (Adversarial Meta-Learning)
Source
- Chelsea Finn, Pieter Abbeel, Sergey Levine. "Model-Agnostic Meta-Learning for Fast Adaptation of Deep Networks." arXiv preprint arXiv:1703.03400v3 (2017).